
FR4IAV
LiDAR localization at 250kph
A French team on an international autonomous race
FR4IAV is a high-level autonomous racing team powered by top French engineering schools, competing in one of the most demanding environments for autonomous systems: professional racing circuits. In A2RL, vehicles must navigate complex tracks, make split-second decisions, and operate without human intervention at very high speeds.
Beyond competition, autonomous racing serves as a real-world laboratory for next-generation mobility. Technologies validated on the track robust localization, perception under extreme dynamics, and real-time decision-making directly contribute to safer autonomous vehicles, advanced driver-assistance systems, and more reliable mobile robotics for public roads, logistics, and smart cities. By supporting FR4IAV, Exwayz contributes to accelerating innovation that will ultimately improve safety, efficiency, and trust in autonomous systems.


High speed races come with high technological challenges
From a use-case perspective, autonomous racing introduces unique and severe constraints:
- Extreme dynamics: very high speeds, strong accelerations, and aggressive maneuvers push localization systems to their limits.
- Precision requirements: centimeter-level accuracy is mandatory to follow racing lines and optimize lap times.
- Robustness: changing lighting conditions, vibrations, and sparse or repetitive track features can degrade perception.
- Real-time performance: localization must run deterministically with ultra-low latency on embedded hardware.
Exwayz technology to enable robust localization
To meet the extreme requirements of autonomous racing, Exwayz deployed Exwayz Navigation, powered by Exwayz SLAM, with a solution specifically tailored to high-speed, high-dynamics environments.
LiDAR-only localization approach, GNSS-independent
Exwayz Navigation relies exclusively on LiDAR sensing, ensuring consistent and reliable localization without any dependency on GNSS. This guarantees constant high accuracy and zero drift in GNSS-denied environments such as the Abu Dhabi circuit tunnel, pitlane exit, and under-track bridges, as well as robustness to lighting variations, shadows, glare, and weather conditions.
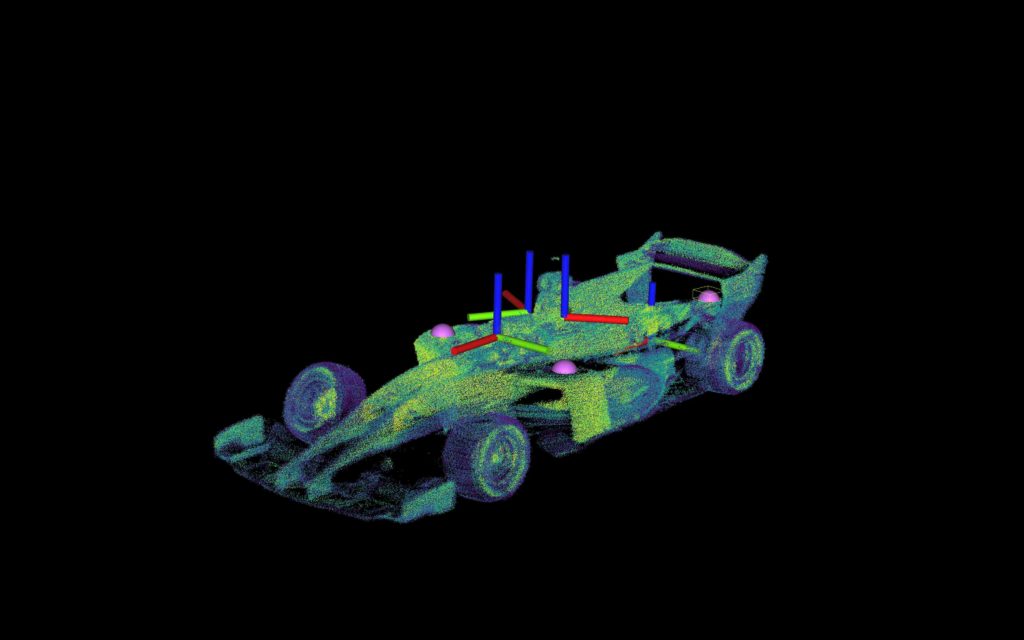
Multi-LiDAR extrinsic calibration and fusion
FR4IAV’s vehicle is equipped with three directional LiDAR sensors. Exwayz SLAM performs precise extrinsic calibration and real-time fusion of these sensors, delivering a unified and coherent 3D perception of the track environment with extended field of view and redundancy.
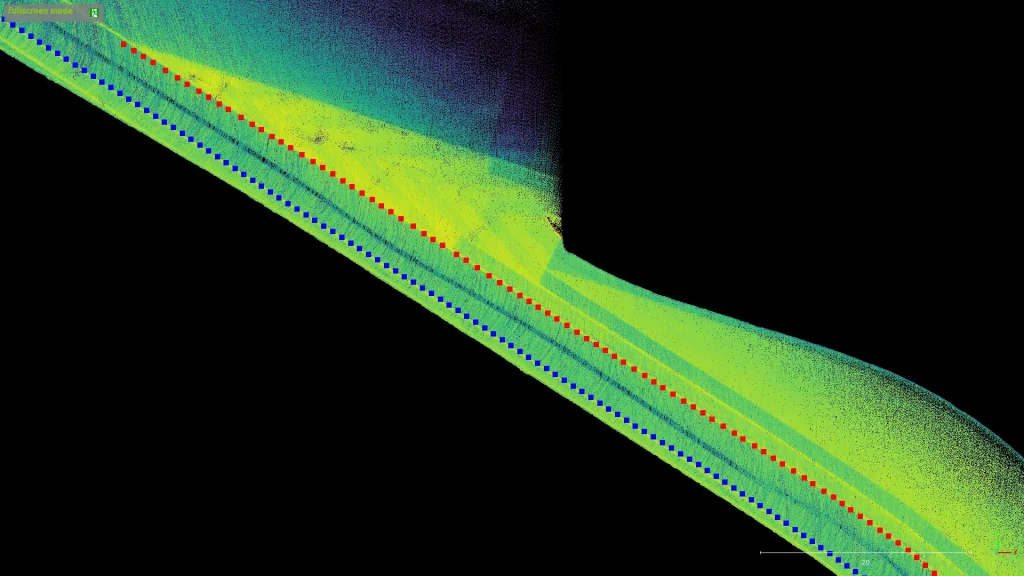
Georeferenced, map-based localization
Localization is performed against a highly accurate, georeferenced 3D map of the racing circuit. This provides high absolute accuracy and precise alignment with the real track geometry, significantly easing the transition from simulation to real-world deployment and reducing on-track tuning time.

Low-latency, high-accuracy pose estimation
Exwayz Navigation computes vehicle position and orientation with ultra-low latency and high accuracy, remaining robust under extreme dynamics, strong accelerations, and in the presence of moving obstacles key to maintaining optimal racing lines at 250+ kph speed.
SLAM-based perception for opponent detection
Beyond localization, Exwayz SLAM enables real-time perception of dynamic objects, allowing FR4IAV to detect and track other competing vehicles on the track and support higher-level autonomous racing strategies.
Together, these capabilities provided FR4IAV with a reliable, race-proven localization and perception backbone, designed to perform where autonomous systems are pushed to their physical and computational limits.
A successful collaboration proven to push autonomous racing boundaries
The collaboration between Exwayz and FR4IAV demonstrates how industrial-grade LiDAR localization can perform at the very edge of autonomous capabilities. By proving Exwayz Navigation in autonomous racing one of the most demanding use cases imaginable Exwayz showcases the maturity, robustness, and performance of its SLAM technology, paving the way for safer and more reliable autonomous systems far beyond the racetrack.
Exwayz’s LiDAR-based localization was absolutely critical to our succes. Its accuracy, robustness, and zero-drift performance in the most challenging parts of the Abu Dhabi circuit gave us the confidence to push autonomous racing to its limits.


